The controller in the PipeMare triple-organ must handle communication with the master, monitor the local power supplies, and of course manage and play all three instruments in the PipeMare cabinet. This means that the controller circuit will be a bit more complex than in the other EnsembleBot instruments.
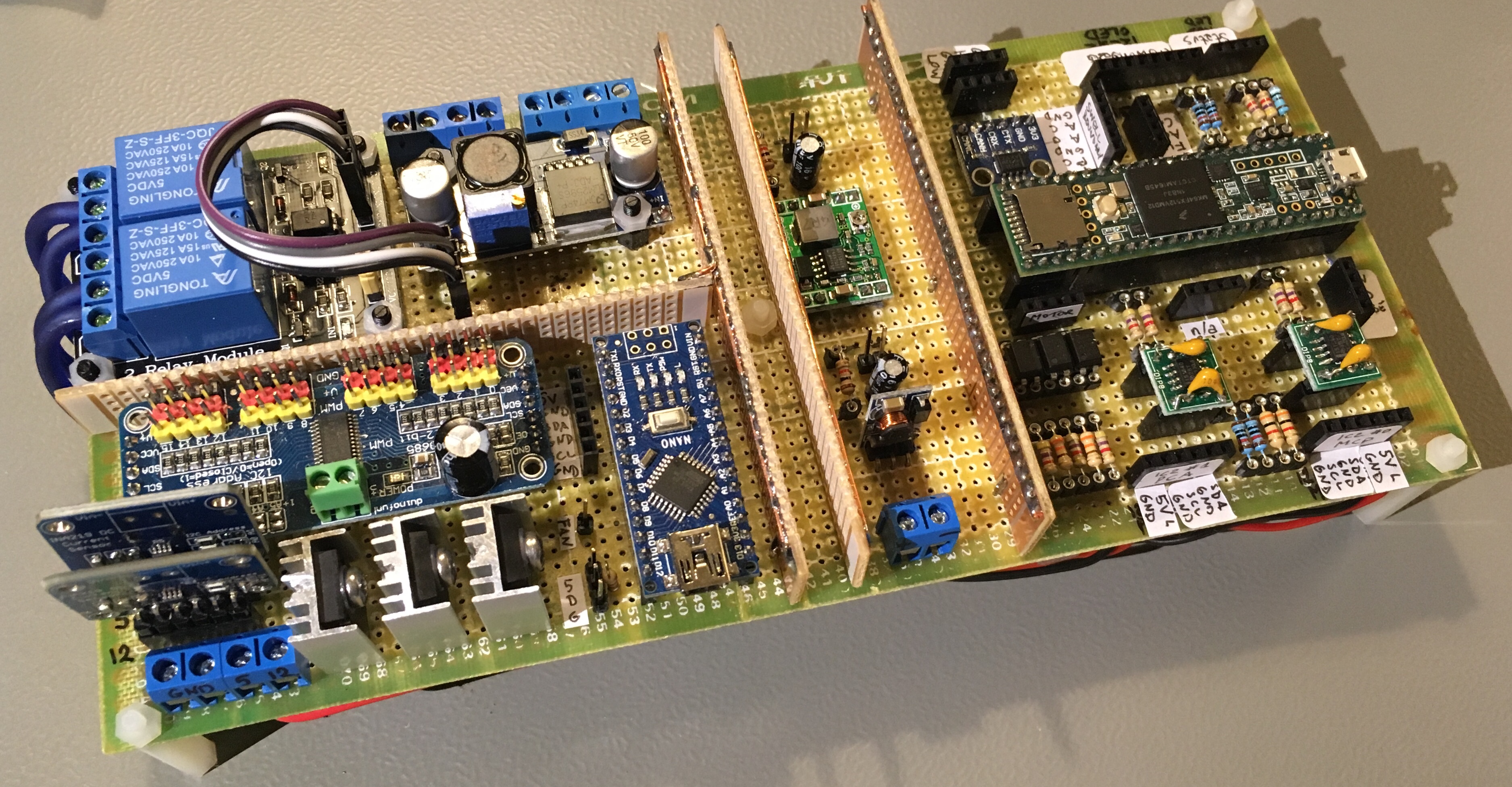
The board is divided into sections by some vertical ground planes to reduce noise from the on-board switching step-down converters. The right side is the main A-side circuitry with the Teensy 3.5 microcontroller in the center, a CAN-bus transceiver, two I2C isolators, optocouplers etc. Just to the left of the main circuitry are two small switching step-down (buck) converters to make stable 5V and 3.3V out of the 12V from the master power supply.
The left side holds the B-side circuitry. In the top left corner is a dual relay for the 5V and 12V power lines, and next to it a step-down buck converter to make a stable and relatively noise-free 5V supply for the secondary controller and support circuitry.
In the bottom left corner we have the secondary controller (Arduino Nano), a PCA9685 PWM-driver board for status RGB LEDs, as well as two INA219 high-side current sensors and their shunt-resistors. This controller will also be connected to one or more Dallas DS18B20 temperature sensors, and to the optocouplers facilitating the simple status messages between the A-side and the B-side controllers.
The controller board is completely cabled, but nothing has been tested yet.