
Even though the EnsembleBot project already is far too big, we can still dream of other instruments we simply must have. Some plans and ideas are more theoretical and far out than others. Other ideas are absolutely serious candidates, coming soon in an EnsembleBot near you!
HURDY-GURDY
This is an awesome robotic project. The history of the hurdy-gurdy (or Drehleier) is very long, with roots back to medieval times. Over the centuries it has evolved to an immensely complex instrument. One could characterize it as an evolutionary dead end. But, in the hands of a master player, a good hurdy-gurdy can produce a fantastic, interesting and rich sound.
The hurdy-gurdy is a string instrument like the violin or cello. However, instead of a straight bow the strings are made to vabrate by turning a rosined, hand-cranked wheel against the strings. The instrument is played by cranking the wheel and pressing keys on a keyboard.

We are going to base the hurdy-gurdy on an existing instrument – a cheap mandolin. We’ve done some tests replacing the flat bridge of a mandolin with a violin bridge reshaped into a concave string arrangement and replacing the strings with cello strings. Placing a rotating and carefully rosined wooden whell above the strings can easily make the instrument sing (or scream, if you like) like a hurdy-gurdy.
Here is a very crude test of the concept:
Where a normal hurdy-gurdy has the wheel inside the instrument body, we are going to place it outside the body and above the strings. The wheel will most likely be cranked by a Nema17 stepper motor or a strong and highly geared DC motor.
The test used 5 strings, and we will most likely use 3 or 4 of the strings as drones (or mouche/bourdon) and the 1 or 2 strings as melody (or chanterelle). The melody string(s) will be controlled with a number of tangents that essentially shortens the vibrating length of the string, thus changing the pitch.
The EnsembleBot Hurdy-gurdy will not feature a trompette/chien or sympathetic strings.
NACHTIGALL
Take two small organ pipes tuned a third apart, submerge the open ends into water and sit back and listen to the nicest bird whistles and songs. This is basically the recipe for a so-called Nachtigall (aka. nightingale, Vogelschrey, bird whistle or a million other names) stop. It’s a rather special sound effect in baroque pipe organs.
A more precise design of such a setup is hard to find, but it may not be more than described above. It could be a fun supplement to the zimbelstern.
ROBO-THEREMIN
Why not combine robotics with the world’s first electronic instrument? The theremin is in principle a very simple instrument, unique in that it’s probably the only instrument played entirely without touching it. Instead, the player moves his or her hands in the air close to a pair of antennae. One antenna controls the pitch – the closer the hand to the antenna, the higher the pitch/note. The other hand controls the volume.
The principle is very simple, and so is the electronics making it happen (pretty much just an open-ended heterodyne oscillator), but as a musical instrument it is insanely hard to play anything but funny sci-fi sounds.This is mainly due to the fact that you have no tactile feedback when playing it, as well as a non-linear distance/pitch response. Only a precious few people has mastered the theremin since its invention in the 1920’s.
Our plan for EnsembleBot is not to build a theremin, but to build the robotic “hands” to play it.
NEW ROBOT GUITAR
Admittedly, the Robro project hasn’t exactly been a great success, so far. Even if full functioning, it would have some serious restrictions compared to a normal guitar, simply by being a slide/steel type of instrument. Now, we chose that solution because of its relative simplicity – a single slide instead of tens of actuators, each working on a single fret of a single string to mimick the action of the guitar players left hand. And it is simpler. But having worked with a lot of different techniques during the last few years, the idea of making a “real” robot guitar is no longer completely out of the question.
SOLENOIDS
Yes, we’re going to need a lot of solenoids (72 just for the first 12 frets, or 96 solenoids for 16 frets), and yes, we are facing a heck of a challenging construction, and yes, we are going to find a practical solution to the heating problem of cheap solenoids (and they have to be very cheap, indeed!). We could use micro-servos instead of solenoids, but that would probably end up being both more expensive and more complex to design and build.
The solenoids don’t have to have a particularly hard attack, but they need to be able to hold their extended position for a while without overheating. In the PipeDream projects we handled this problem by designing special dual-channel driver stages with attenuated holding currents to cope with the 1 A current draw of the ZYE1-0530Z solenoids. Here we can use smaller solenoids, or at least solenoids with higher impedance and lower current.
DRIVER

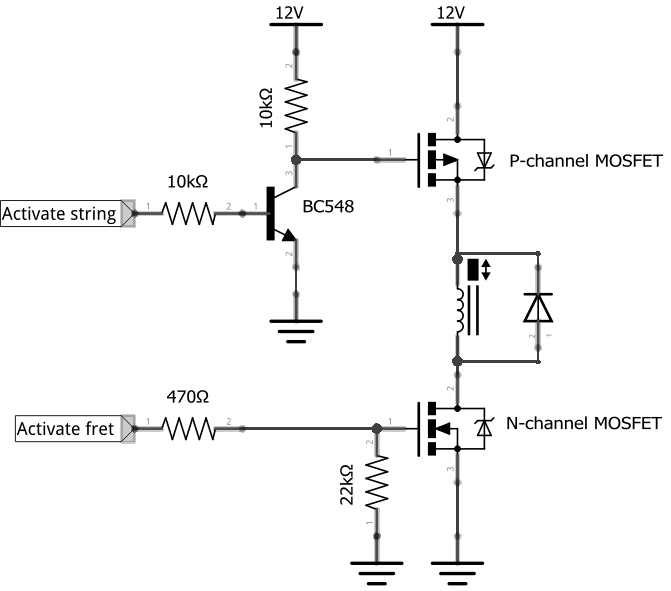
Even though we’re going to need maybe 96 solenoids, we don’t actually need as many drivers. Since only one solenoid per string will be active at any given time, we can set up a matrix driver stage with e.g. 6 P-channel MOSFET drivers (one for each string) and 16 N-channel MOSFET drivers (one for each fret).
This principle is shown to the right for a subset of the needed solenoids. Here simple switches are shown in place of the MOSFETs.
The six high-side P-channel MOSFETs and the 16 low-side N-channel MOSFETs can be configured like shown in the partial schematic below. The 16 fret drivers can be driven by a 16-channel PWM driver module, enabling us to switch the driving current to PWM after a few milliseconds to achieve an effectively lower holding current.
The common PCA9685-based modules may not be good enough, as their maximum PWM frequency is only about 1.5 kHz, and we’ll most likely need a faster PWM frequency to switch faster than the decay of the solenoid magnetic field. So, a homemade driver based on the similar (but faster) PCA9635 could be an option with a PWM frequency of 97 kHz. This is more than fast enough, and should eliminate any problems with demagnetization and dithering.
PROTOTYPE
But much thinking and testing and designing has to be made, before we start ruining a guitar. Even so, I already designed and had produced a PCB for a PCA9635-based driver moduled.

A shout-out to EasyEDA.com is in order here. This is the third time I use them to etch, drill and silk-screen my PCB designs, and every time they’ve done a beautiful job at a very reasonable price. You’re likely to pay more for shipping than production, but you’ll have your PCBs within a week.
The board is to a large extend based on the MCP23015 I/O expander and driver boards made for the PipeMare pipe organs. The N-channel MOSFET part is identical, while the logic part is redesigned for the PCA9635 TSSOP-28 chip. Like the MCP23017 boards, these are also stackable, and even with identically located stacking connectors, making it possible to actually combine these driver boards in the same stack.
ETA: It turns out, that I should have tested the PCA9635 driver circuit more thoroughly, before having the PCBs made. Driving MOSFETs at 97 kHz directly from the PCA9635 output ports, is a sure way to destroy the MOSFETs. The MOSFET gate reaches full saturation (the transition from closed to fully open) fast, but not instantaneously. At “normal” PWM frequencies in the realm of 1 kHz, this is no problem at all, but 97 kHz means a hundred times more transitions per second, and thus a hundred times more power dissipated in the MOSFET. Not good. The solution is to use MOSFET drivers between the PCA9635 and the MOSFET gates, so I’ll have to redesign the driver boards. But not until I’ve tested a prototype. Fool me once…
Now, these boards are not actually made for this guitar project alone, but as a possible general replacement for the dual-channel principle for driving solenoids, that we used in PipeDream61. If we ever go ahead with the guitar project, we’ll most likely make another compatible stackable module with MCP23017 or similar I/O expanders and P-channel MOSFETs with gate transistors.
The strings can be picked in the same way as the Robro picks, using micro-servos, but we might try something different, like bi-directional push-pull solenoids. They could be made to work much faster than cheap plastic micro-servos, and they would be much easier to calibrate.
Next: Check the videos of EnembleBot in action
Loved your website, especially the details for the reservoirs. I’m looking to build one and you’ve got the best information that I could find online.
I noticed that you have not built a Tremulant. Considering that you like to keep things as simple as possible, I’d like to offer you my Simplicity Tremulant., US Patent #11,02&4,268. If you are interested, let me know. You’ll spend far more time buying the parts than you will building it (possibly 20 minutes).