
Our first organ blower system, the PipeWind v.1, was good enough for both our PipeDream24 test organ and the larger PipeDream61 full rank organ. But it will not be enough to supply air to both the PipeDream61, the PipeMare triple-organ, and the Zimbelstern. So we had to build a larger (and better) blower system.
Read more about the basics of organ wind in the PipeWind main page.
Project status: Finished, but needs fine-tuning and testing
BLOWER
In PipeWind v.1 we used two small centrifugal fan blowers, originally intended for cooling purposes in military radar equipment. They were quite powerful for their size (about the side of a closed fist), but still too small to be able to supply a decent air flow.

Actual organ blowers, even for smaller organs like ours, are usually very expensive. An with good reason. They have to be quiet, strong, and work reliably for decades without service. But we don’t have that kind of money, so we did something else.
If we forego some of the demands to the organ blower, especially the points about it being quiet and reliable, there is a very clear alternative: bounce house blowers. Blowers to inflate bounce houses are cheap, produce a lot of air flow, can maintain a decent pressure over time without overheating. And we were lucky enough to find a used blower for only about £10.
Early tests showed us, that it was easily able to maintain a pressure of more than the 3″ w.c. that we aim for, and air flow is not going to be an issue with this baby. However, having a plastic casing and not designed as a silent blower, it is very noisy, indeed. So, we will have to build a sound proof enclosure for the blower itself, and as we learned from PipeWind v.1, we need to address the secondary noise issue, where most of the noise is transmitted out through the air stream.
BLOWER BOX

The blower box is built of 20 mm plywood, and the insides are covered in noise-reducing foam sheets. The blower itself is fastened with vibration reduction mounts and placed on a sheet of bitumen at the bottom of the box.
The top is made as a hinged lid to have an easy service access to the blower. Behind the air intakes at the end of the box we placed a simple baffle (not shown in the image) to reduce the noise escaping from the blower box.
To reduce vibrational noise transmitted from the blower to the exhaust we connected the blower output to the exhaust manifold with a leather hose/gasket.
Inside the box we also put a variable motor controller, so we can adjust the blower power.
BAFFLE

The blower can be located far away from the organ to reduce the problem of direct blower noise, but that won’t do much to reduce the secondary noise through the air channels.
Much of this noise can be removed by leading the air stream through a series of baffles. We built a dedicated baffle box to be mounted directly onto the blower box’ output.
The output from the blower enters the baffle at the bottom, and the output is at the top. The box has two baffles, both covered in both bitumen sheets and noise reducing foam.

The baffle box is mounted directly onto the blower box.
Compared to the PipeWind v.1 blower box, we ended up with a much better and powerful blower, and a much less noisy solution, despite the larger blower. I won’t go as far as calling it silent, because the primary blower noise is still prominent, but the secondary noise is almost completely killed by the baffle box. So, we are going to have to place the blower away from the EnsembleBot (in another room), but that is OK.
In PipeWind v.1 the “air trunks” were 32mm PVC tubes, where we now use 102 mm flex-tubes. While it doesn’t sound like much of a difference, consider the change in cross section. With a 32 mm tube we get a cross section of 804 mm2, while the 102 mm tube gives us a cross section of 8171 mm2, i.e. a more than 10 times larger air channel. This reduces the loss in pressure and air flow just because of air trunk constriction. Even so, the crinkled insides of flex-tubes introduce a larger friction, and thereby also a resultant loss of pressure.
The larger tubes also means a larger body of air between the blower/regulator and the organs, and that introduces some other problems we’ll consider below.
PRESSURE REGULATOR
To ensure a stable and calibrated air pressure, we will of course need to have a reservoir and pressure regulator. There are many ways to build a pressure regulator, but most of them are implemented as some sort of bellows, either spring loaded or weighted. In PipeWind v.1 we used a weighted, hinged bellows.

Now, it’s no secret that we are lazy, so we’ll go for the weighted bellows again. To mitigate the issue with intertia and slow reaction to pressure changes, we’ll take some steps closer to the organs, by building a concussion bellows (a so-called schwimmer) into the air manifold, as described below. But we won’t know whether that is enough or not, until we can test it on the complete PipeDream61/PipeMare setup.
As mentioned in the Pipemare Accordion page, we saved the accordion bellows for other uses. And this is it. We thought it could look cool to reuse the bellows as a pressure regulator.


Basically we closed one side of the bellows with a board, and mounted the bellows onto a reservoir.
The reservoir is nothing but an empty box with an air intake in one end, an air exhaust on the other end, and the bellows regulator on top.
To make sure the bellows don’t extend more than it should, we build an over-pressure valve into the top lid of the bellows.
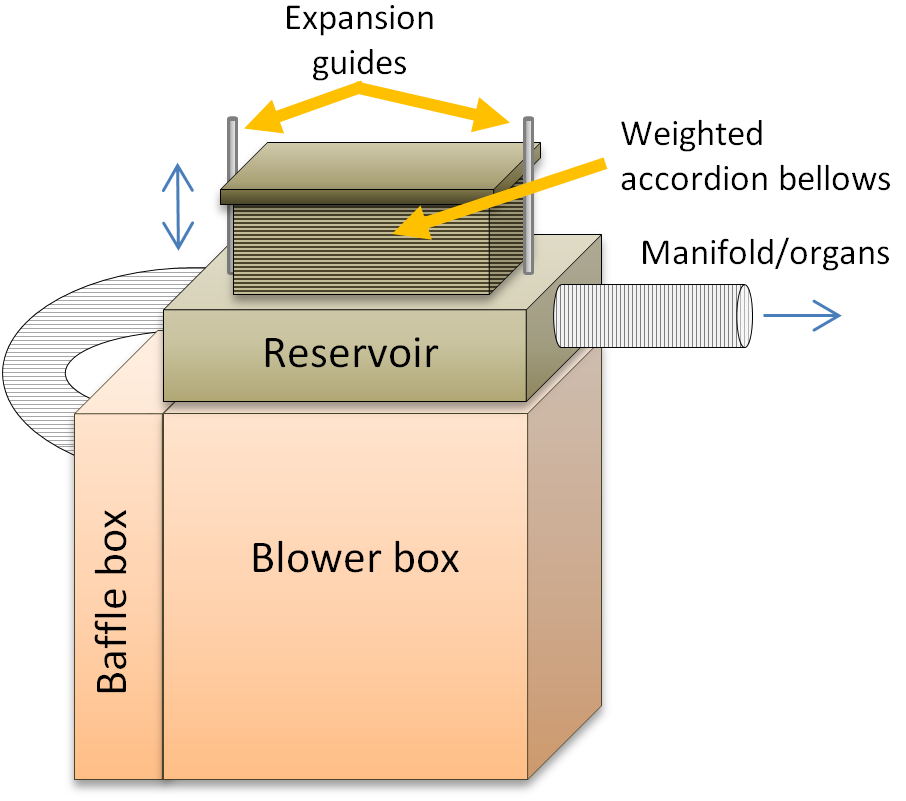
A piece of string is fixed at one end to the bottom of the bellows (or top of the reservoir, if you will), and at the other end to a springloaded exhaust valve in the middle of the top bellows board. With pressure the bellows expands, and when the pressure reaches a certain level, the expansion pulls the string and opens the valve. This reduces the pressure and stops the expansion. The trick is to adjust the blower power and bellows weight to the point where the over-pressure valve is just activated and the static pressure is 3″ w.c.

The accordion bellows does have a serious problem. As it expands and the heavily weighted top rises, it soon topples over, which, needless to say, is catastrophic. So we placed 10 mm steel shafts at each end of the bellows, and mounted linear ball bearings on the bellows top board to make sure the bellows only can move straight up and down.
Our bellows looks really good and it sort of works, but it’s a bit sluggish, not quite precise enough and it does not exactly use reverse-fold expansion as described above. We’ll have to wait and see, when PipeMare project is complete, if it does a bad job at maintaining a stable pressure. If that’s the case, we can easily remove the bellows and replace it with some other solution, most likely a classic weighted .
Update: The regulator based on the accordion bellows is indeed much too sluggish and imprecise for an organ. It reacts too slowly – when it reacts at all! So, even though it looks great, we are going to have to redesign and rebuild it from scratch. Fortunately, building classic folding bellows as shown above, is a pretty well-documented process. Richard Vance writes in his article “Building organ bellows“:
There have been many very clever people in the organ building racket for the last 400 years, but they still make bellows the same old way. There must be something to it.
Seems like a good excuse to try working with hot hide glue and leather. The bellows, as it’s currently planned inside my head, makes for a much larger reservoir, requiring a pressure weight of maybe 10-15 kg. This is a lot, and it will introduce a substantial inertia, compromising its ability to respond quickly to pressure changes, and may even introduce new pressure spikes/ringing. So, I will seriously have to consider building a springloaded bellows instead of a weighted one. I think the benefits of a lighter and faster regulation outweighs the disadvantages, like a non-linear expansion force.

Also, while we’re at it, we are going to move the regulator closer to the organ to keep the larger stretches of air trunk between the blower and regulator. This will improve the regulator’s ability to respond faster to pressure changes. We are still going to keep the actual blower box away from the organ (in another room, in fact) because of noise issues.
MANIFOLD

A part of the PipeWind blower system is actually placed on the PipeMare cupboard. The air from the blower system is led through 102 mm flex-tube, but it will feed at least 4 organs (PipeDream61 and the three PipeMare instruments). So we feed the air into a distribution manifold, that we placed on the side of the Pipemare cupboard.
The manifold is just a box with a 102 mm input and 5 outputs in the form of 40 mm tubes. As the manifold is very close to the organs receiving the air, we don’t worry too much about loss of air pressure because of tube sizes. With 5 ouputs we’ll have one in spare for future projects.
PRESSURE MONITOR
As mentioned above, the weighted pressure regulator is relatively slow to react to pressure changes. This combined with a fairly large volume of air in the tubings means that we may experience some problems with wobbly pressure levels.

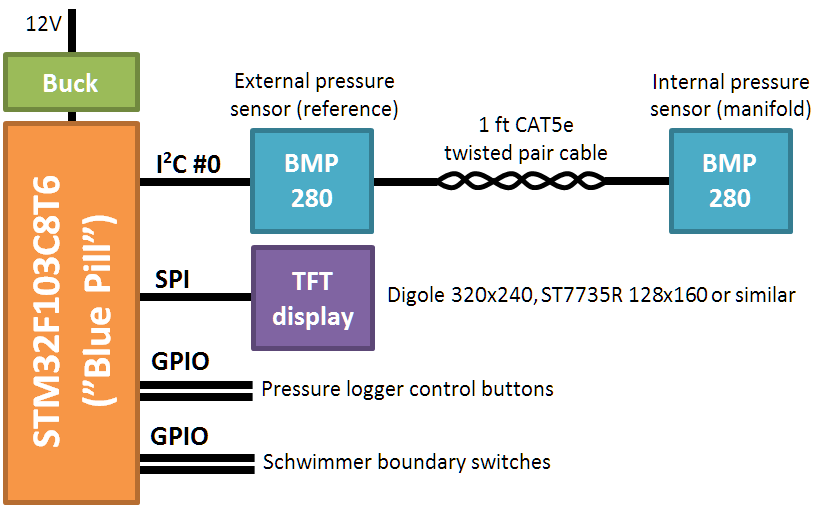
To get an idea of the problem, and to have a means to monitor the pressure continuously, we are building a small pressure monitor into the manifold. The monitor will use two pressure sensors – an external sensor to measure the atmospheric pressure, and an internal sensor to measure the pressurized manifold pressure. The difference between these two pressures gives us the organ pressure without the need for pre-pressure calibrations.
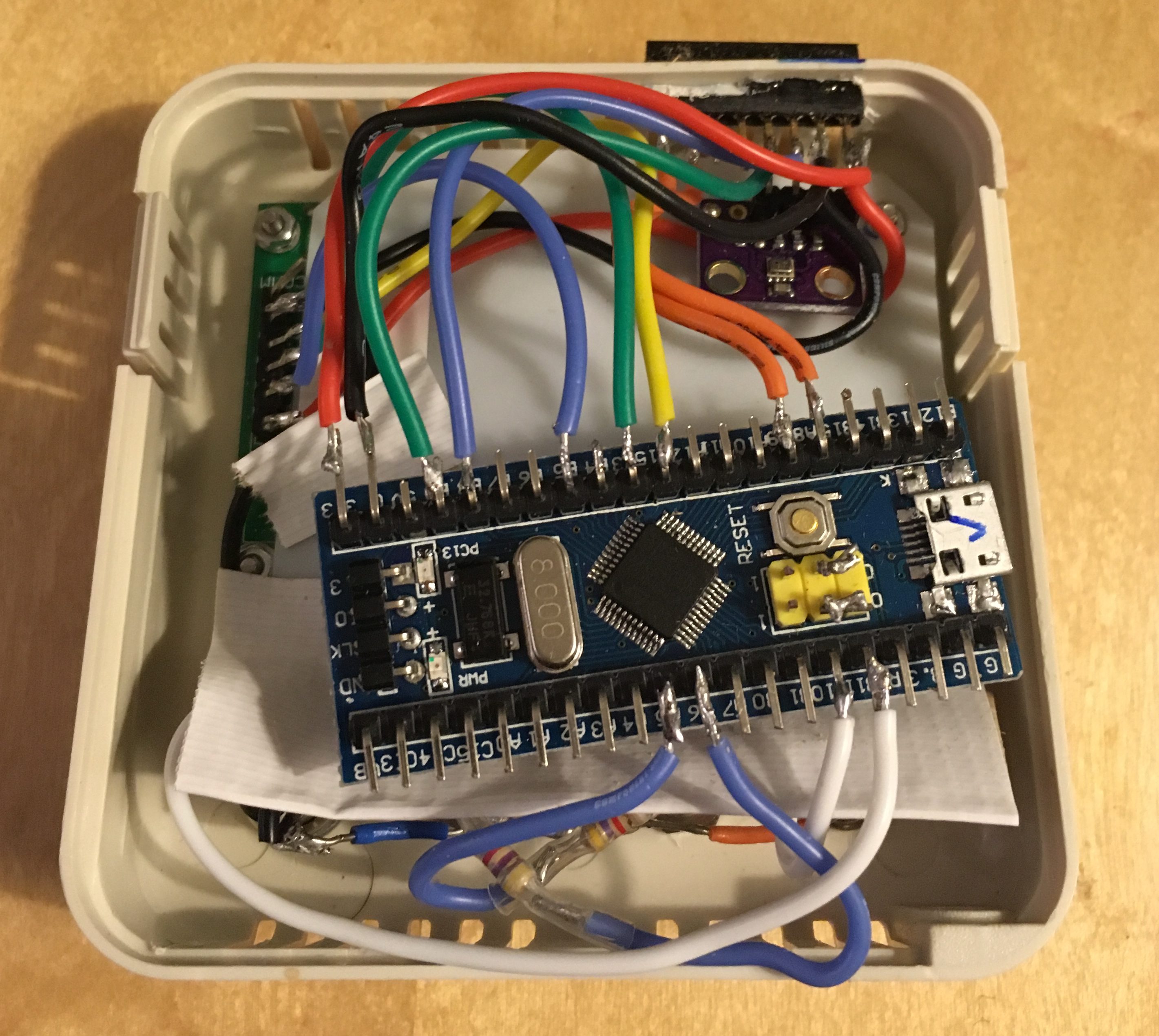
The monitor is based on a STM32F103 “Blue Pill” micro-controller. These are very similar to Arduinos, though not quite as easy to work with. They are pretty much the same size as an Arduino Nano, but packs a lot more power with its 72 Mhz ARM processor and 20 KB SRAM. However, it’s not quite as well supported in terms of libraries in the Arduino IDE, and the native (hardware) I²C is a bit troublesome.
Update: The STM32F103C just didn’t work out. Too much trouble making them work, and then, suddenly, some software update rendered them unprogrammable. There is no doubt a solution out there, but having had so much trouble with these microcontrollers, we just give up. No more. Finito.
Instead we use the much more reliable, though much more expensive, Teensy 3.2. It’s a 72 MHz controller as well, but it has two hardware I2C channels, where the STM32F103C only supports a SoftWire bit-banging implementation of I2C. Having two dedicated I2C busses helps us keeping the bus capacitance down, and thus, hopefully, enabling us to run the BMP280 sensors at 400 kHz.
Read more about our choices of microcontrollers in our microcontroller page.
Being a 3.3 V micro-controller, it interfaces directly with the two Bosch BMP280 pressure sensors and a Digole TFT display without the need for level converters.
The firmware hasn’t been completed yet, but the plan is for the monitor to have two functions. In normal operation it will make constant measurements and display the current pressure in large, friendly letters, as well as a small graph/curve showing the pressure changes over time.
But at the press of a button, the monitor will enter a log mode, where it will make a burst of 300 measurements in 3 seconds. This will give us a detailed pressure response, showing potential problems with both slower pressure regulation or faster pressure transients.
TIME FOR A SCHWIM
And what are pressure transients, exactly? While the large pressure regulator on the blower box maintains a stable pressure over time, it can’t do anything about the small and fast pressure drops that occur inside the organ windchests as pipes are activated. If uncompensated, one or several pipe valves opening simultaneously can result in a sudden but shortlived local drop in air pressure, followed by a ringing phenomena where the pressure wobbles a bit up and down.
Though these transients are shortlived and are measued in milliseconds, they can result in very noticeable sound changes like pipes out of tune or short fluttering.
In large organs, these phenomena are reduced by placing a so-called concussion bellows directly on (or under) the windchest. Designed as either a schwimmer or a winker they are basically small, springloaded and fast-reacting bellows, which can absorb the transients very effectively. If the bellows is designed as a floating board, it’s calles a schwimmer, and if it’s a hinged bellows, it’s called a winker, but otherwise their function is similar.
That is all well and good, but the windchests in PipeMare are so compact because of design restrictions, that there simply isn’t room for schwimmers, and we weren’t aware of such needs when designing the PipeDream61.
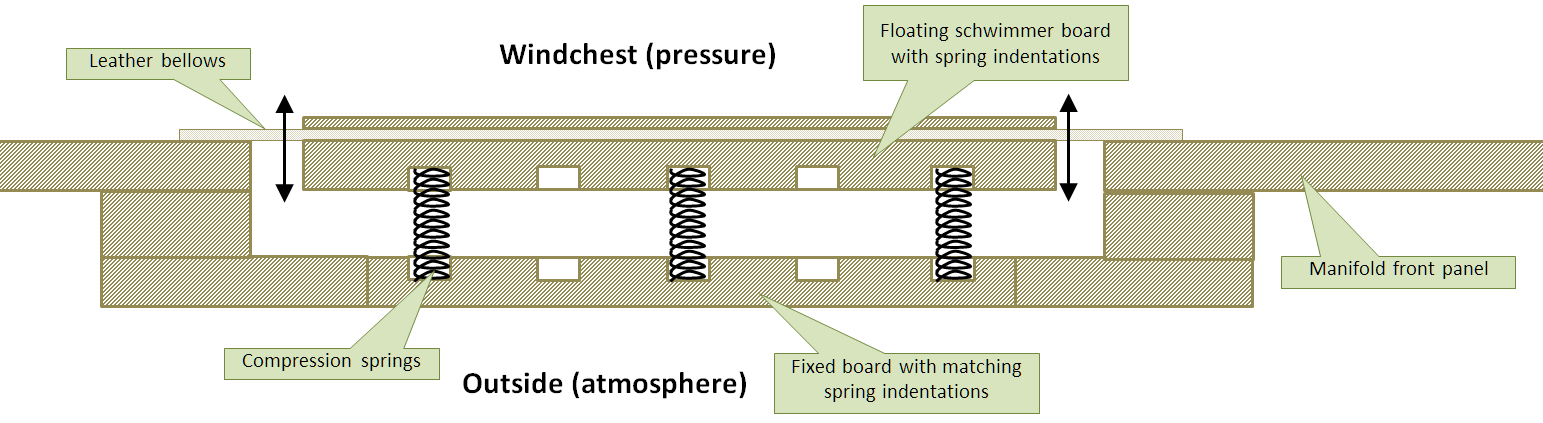

So we do the next best thing by placing a largish schwimmer in the manifold. The schwimmer is a thin wooden board floating on a large piece of leather in a cutout in the manifold front.
We also place to microswitches to detect if the schwimmer reaches its extreme positions. This will be shown on the pressure monitor as a visual indicator of an insufficient concussion bellows.
If it should turn out, that the manifold schwimmer isn’t efficient enough to deal with transients, we may have to build external concussion bellows (winkers) for each organ, connected to the windchests through short tubes.

STATUS
[July 2018]
The manifold pressure monitor is a bit problematic, as it won’t accept both BMP280 pressure sensors present at the same time. Whether it’s a question of bad I²C hardware addressing, bus/signal problems or the bit-banging SoftWire I²C library on the Blue Pill, is not determined yet.
[June 2018]
When the PipeMare project and the pressure monitor are finished, we can begin evaluating the design decisions we have made. There is this nagging suspicion, that the accordion bellows just isn’t good enough, but there’s no reason to raise hell before we have some empirical data.
Stumbled across this excellent site when pondering a fan to replace foot pump in a homemade organ I was just given. Finally concluded, as you did, a bounce blower was the only solution then I pondered pressure regulation and noise of the fan and fluctuations caused by activating notes. Thank you for sharing! You just saved me failed attempts and weeks/months of frustration!
You are most welcome, sir! I hope your project turns out well.